はじめに
こんにちは、もれなみです。前回 、DCモータの特性を計測する際に模造品?らしきモジュール基板を掴んで手間取ったので、リベンジと称して電流センサの基板を自作することにしました。
今回のハイライトはこちらです。
はじめてのオリジナル基板
これまで、基板はたまに回路図やデータシートを読む程度で、趣味の範囲でもブレッドボードで遊ぶくらいだったので自作は今回が初めてです。プリント基板(PCB)の作成はCADの勉強に時間がかかりそうなので、今回はユニバーサル基板で作ることにしました。
仕様の検討
とりあえずざっくり仕様を検討します。
目的 :BLDCのモータ電流を測る。3相同時。機能 :電流は±5A以上。周波数応答は20kHzまで要。AC必須できればDCも。インターフェース :Analog Discovery 2 ※で計測する(5V給電可)
※最近値上がりしているようでADALM2000 でも良さそうです
あと今回は「お安く自作できる」という制約が付きますので、秋月電子 やマルツオンラインを眺めながら良さそうな部品を探します。
主要部品の選定
シャント抵抗による電流検出センサ と悩んだ末、ホール素子による電流検出センサICのACS724LLCTR‐10AB‐T (Allegro社)しました。
電流の検出方式についてはROHM やHIOKI のサイトにいろいろな種類が紹介されています。
ホール素子は周囲の磁気的な影響を受けやすいみたいですが、今回の趣旨は前回 のリベンジなので同じメーカの類似品を使って製作してみようと思います。
回路の設計(?)
メインパーツが決まったので、回路の設計を考えていきます。といっても私は素人なのでてきとうです。
電流センサの帯域の設定
0A時の電圧出力はVcc/2(=2.5V)と0V両方取り出せるようにする
消費電力と動作点灯LED
モータ回路側の想定電流は6A~10A(センサ定格)
ノイズ対策?知らない子ですね。
一つ一つ細かく見ていきます。
帯域の設定
ACS724のデータシート(秋月電子) では、6ピンに接続するコンデンサ の容量で帯域フィルターになると書いてあり、内部のブロック図(下図)を見ると抵抗コンデンサ 容量を決めます。今回は入手性の良い
ACS724の機能ブロック図(データシートより)
2系統の電圧出力
ACS724の出力は0Aが2.5V(=Vcc/2)となるように出力します。Arduino などのアナログ入力を用いる場合にはこれでいいのですが、Analog Discovery 2では+25V~-25Vまで計測することができるので、0Aで0Vを計測できた方が都合がいいです。そのため、今回は2つの10kΩ抵抗で2.5Vを作り、そこを基準電圧として計測できるようにしておきます。
消費電力と動作点灯LED
Analog Discovery 2からUSB給電で動かす場合、5V電源で供給できる電流は500mW(100mA)までです。
今回の部品の消費電力を確認しておきます。
今回は動作点灯用LED を設置するのでそちらも含めて、以下の通りです。
No.
部品
消費電力
1
ACS724×3
5V×14mA×3=210mW
2
10kΩ×2
5V×0.5mA=2.5mW
3
330Ω×2+LED
660Ω×(5mA)2 +1.85V×5mA=25.8mW
合計
238.3mW
というわけで、Analog Discovery 2はUSB給電で十分動作させることができそうです。
モータ回路の許容電流
モータ側の回路の想定電流は±5Aくらいですが、実際に使用する部品側の許容電流を確認します。センサは選定済み、接続端子とワイヤーもあたり付けしたものを使用すると↓のような感じです。
ACS724:10Aまで
接続端子 :17.5Aまで配線:8Aくらいまで ※すずめっき線Φ1.0mm(ユニバーサル基板の穴径ギリ)
Φ1.0すずめっき線の許容電流は昭和電線のカタログ (下図)から内線規程のΦ1.2mmビニル電線ケーブルの許容電流を元に、導体径の比(1.0/1.2)で計算すると16Aくらいです。制御回路ではΦ0.6mmのすずめっき線を使用しますが、同じ計算で9.5Aくらいの計算になるのでちょっと多いという印象。なので0.5がけの8Aくらいまでかなぁって感じです。
電線の許容電流
この辺は放熱性や周囲温度で変わるので、条件次第というところです。時間と機材があれば実環境の通電時の温度を見てもいいかもしれません。
回路図の作成
ここまで計算が終わったので回路図と配線図に起こします。今回のブレッドボードはサンハヤト のICB-288G を使っていますが、少し大きいボードデータしかなかったので、詰め込んで設計しました。
(回路図も配線図も何度か書き直しました。)
回路図
配線図
基板製作
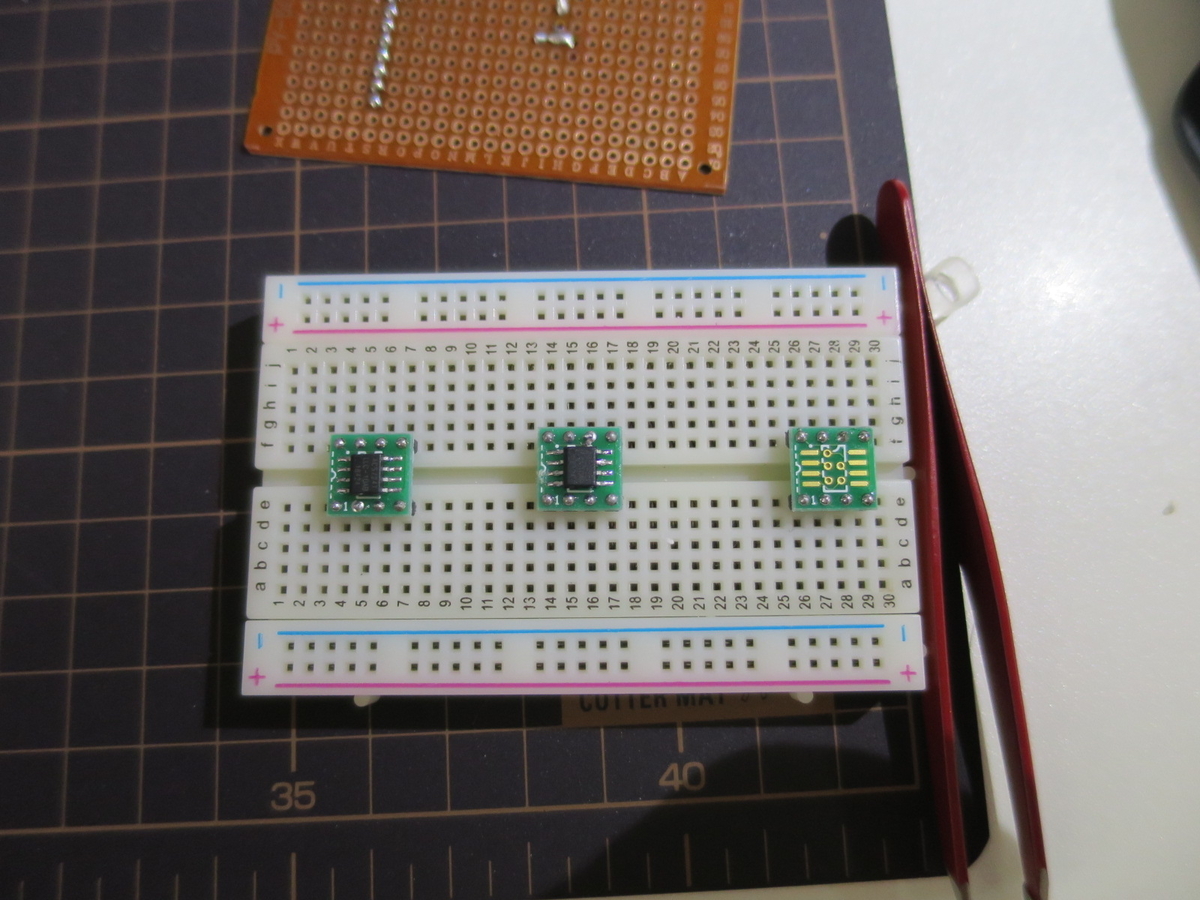
ここからは製作ダイジェストです。今回初めてSOPサイズのはんだ付けをしましたが、なんとかうまくいきました。
SOPのはんだ付け
ちなみに製作途中で秋月でチップの変換基板のパターン幅が電流に対して狭すぎることに気づいて、Φ1mmすずめっき線を直接はんだ付けする魔改造 を施してます。
魔改造
KiCADの計算ツール(IPC2221)によれば6mils(約0.15mm)の許容電流は170mAくらいまでみたいなので、通電前に気づいてよかったです。
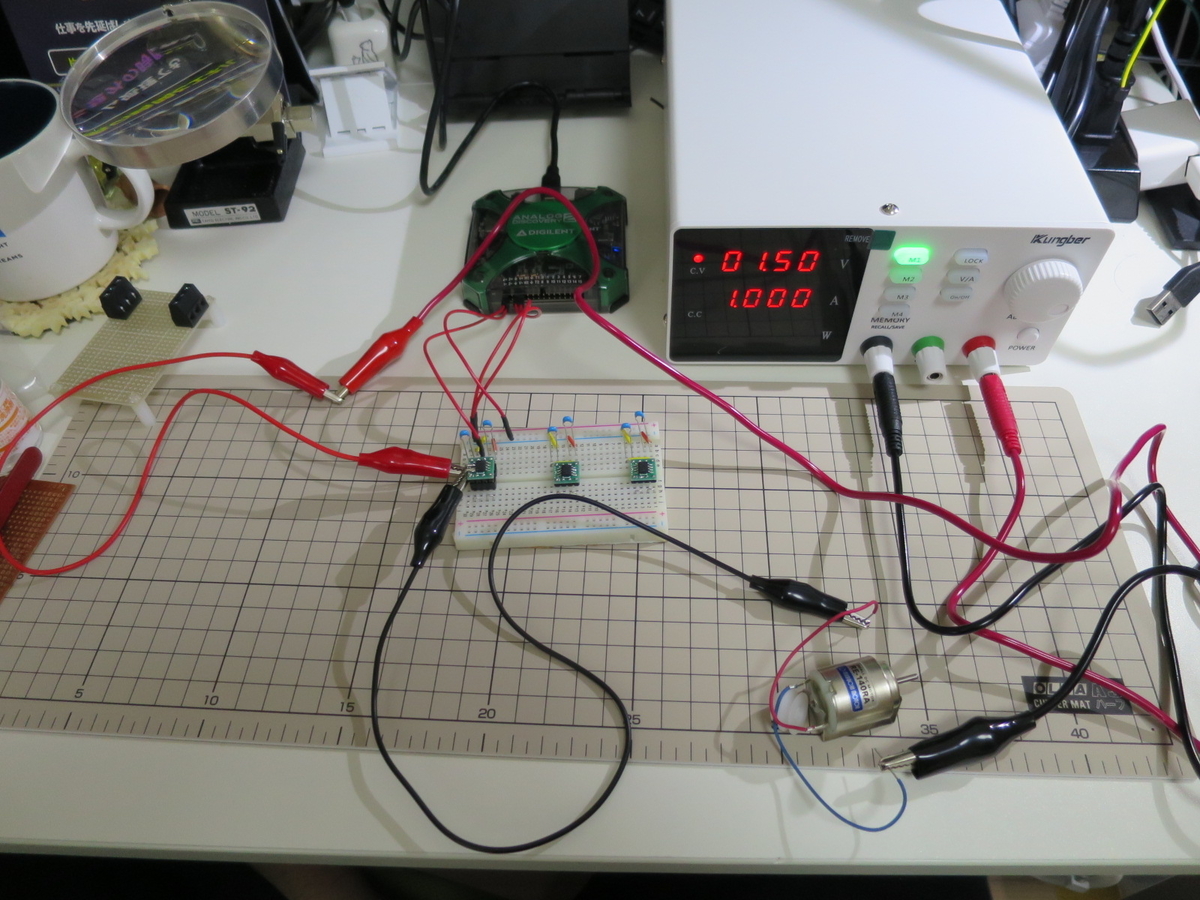
ACS724は魔改造 後に動作確認をしてちゃんと電流が計測できていることを確認します。インプロセス試験大事。
通電確認
通電確認(計測波形)
動作確認は短絡状態だったので安定化電源の立ち上がりを拾ってますが、きちんと測れてそうです。1A通電時のノイズ幅は20mVくらいでしたので、フルスケール±10Aに対してふらつきは±0.05Aと結構いい範囲で計測できていると思います。
完成~
というわけで四苦八苦しながらなんとか完成まで漕ぎつけました。Analog Discovery 2の同時計測は2ch までなので、いつかArduino 等で3ch同時に計測してリアルタイム表示できるようにしたいですね
完成~




































")

")

")